
Trabajo realizado en la FES Cuautitlán
Diseñan prótesis que funciona con impulsos bioeléctricos
Entre sus ventajas se encuentra que el individuo no necesitará una rehabilitación o entrenamiento técnico especializado
Desde 2016, junto a estudiantes de Ingeniería en Telecomunicaciones, Sistemas y Electrónica (ITSE) e Ingeniería Mecánica Eléctrica (IME), trabaja en el uso de señales o impulsos bioeléctricos generados por el cuerpo para controlar dispositivos electrónicos (prótesis), que cuenten con este sistema de reconocimiento. “Todos los seres vivos producimos estas señales en cualquiera de nuestros movimientos, incluso cuando se pierde algún miembro se siguen presentando”, explicó Tinoco.
Cabe resaltar que, aunque hay variaciones entre cada individuo, se pueden identificar patrones que sirven con el fin de lograr una clasificación. Para esta tarea, los universitarios toman diversas muestras bioeléctricas de cada movimiento a replicar y, mediante una red neuronal artificial, caracterizan la información que da el cuerpo.
Una red neuronal artificial es un modelo computacional que trata de emular el aprendizaje que se realiza dentro del cerebro humano. Este modelo es capaz de aprender con entrenamiento y repeticiones un comportamiento o patrón, al dominarlo la red transmite la información a la prótesis y ésta realiza la respuesta a la contracción o el movimiento muscular programado.
Luego de identificar los impulsos bioeléctricos que logran que el dispositivo ejecute determinada acción y establecer las redes neuronales con datos generalizados, el siguiente paso consistió en desarrollar el control total de un dispositivo a través de señales bioeléctricas y trasladar este mecanismo a otros medios electrónicos.
En 2020, el grupo de trabajo hizo una prótesis robótica para perros y facilitar el caminar de los que no tienen una extremidad, debido a que las existentes en el mercado carecen de un movimiento natural, degeneran la estructura ósea del animal y disminuyen su calidad de vida.
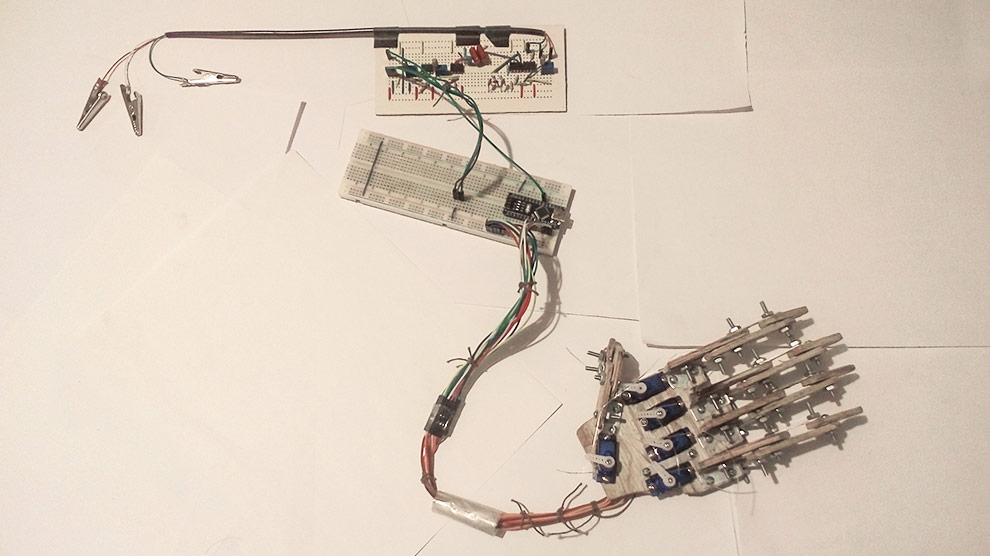
Este año el investigador trabajó con José Amador Ferrer Varela, alumno de ITSE, en la generación de una prótesis de mano, valiéndose de diferentes ramas, como la inteligencia artificial, electrónica y los sistemas embebidos (que funcionan de manera independiente). La finalidad: que el diseño del sustituto artificial del miembro sea menos rígido que las prótesis convencionales y que, principalmente, sea funcional, que no sólo cumpla con un papel estético.
Utilizaron materiales de bajo costo (madera) para construir el elemento tecnológico. En el caso del sistema electrónico, usaron amplificadores operacionales para diseñar sus propios sensores y emplearon servomotores para generar las contracciones de la mano ficticia. Además, adquirieron electrodos para la recolección de las señales bioeléctricas. El diseño y entrenamiento de la red neuronal se efectuó por medio del software Matlab.
El impacto de este proyecto es muy alto; uno de sus principales beneficios es motriz, porque permite a la persona interactuar igual como si tuviera el miembro. “Si bien es cierto que no lo sustituirá, va a contribuir a mejorar la calidad de vida del usuario”, aseveró el investigador.
Metodología replicable
Entre las ventajas de este desarrollo, el individuo no necesitará una rehabilitación o entrenamiento técnico especializado porque el cuerpo ya conoce las señales bioeléctricas indispensables para operarlo y no requieren de un permiso de salubridad, puesto que emplean sensores cutáneos. Por tanto, las pruebas no son invasivas y, hasta el momento, este sistema de sensores ha demostrado funcionar con éxito.
En cuanto a lo tecnológico, destaca que la metodología creada es ajustable y se puede replicar para cualquier otro miembro (pies, dedos, etcétera). Por otra parte, al usar este tipo de materiales la prótesis es más accesible y es posible reproducirla de una manera más sencilla.
La siguiente fase incluye minimizar la prótesis, darle instrumentación y hacer el diseño industrial para que sea un prototipo más estético, menos pesado y que no genere incomodidad al usarlo.
En la búsqueda de generar una herramienta más estilizada, David Tinoco completará el diseño con impresión 3-D. “Sabemos que el material no tiene la dureza para garantizar una vida larga, pero puede funcionar para cubrir ciertas características por un determinado periodo y mantenerlo en un rango de precio económico”.
Otro plan para esta iniciativa es que el prototipo esté al alcance de personas con esta condición. “Toda la información del proyecto se liberará en nuestra página de divulgación con el propósito de que cualquier individuo interesado pueda reproducirla” (https://virtual.cuautitlan.unam.mx/intar/).